控制工程基础
动态数学模型
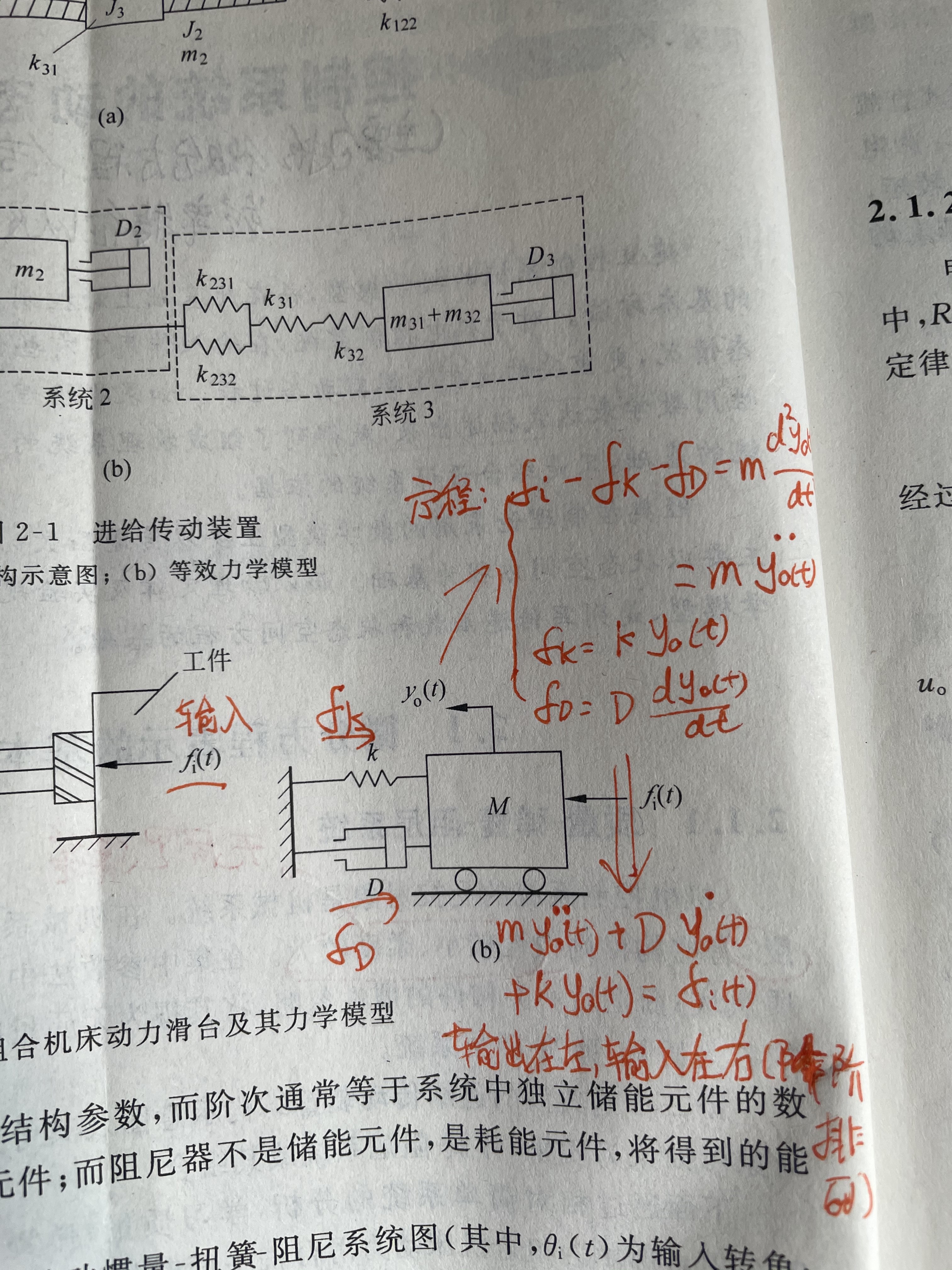
质量-弹簧-阻尼系统(平移):
牛二定律:F=ma=mdtdv=mdt2d2x
弹簧相关:fk(t)=k[x1(t)−x2(t)]=kx(t)
阻尼相关:fD(t)=Dv(t)=Ddtdx(t)
建立数学模型:根据牛二定律把方程写好,带入弹簧阻尼式子进去,然后整理成微分方程,左边输出,右边输入
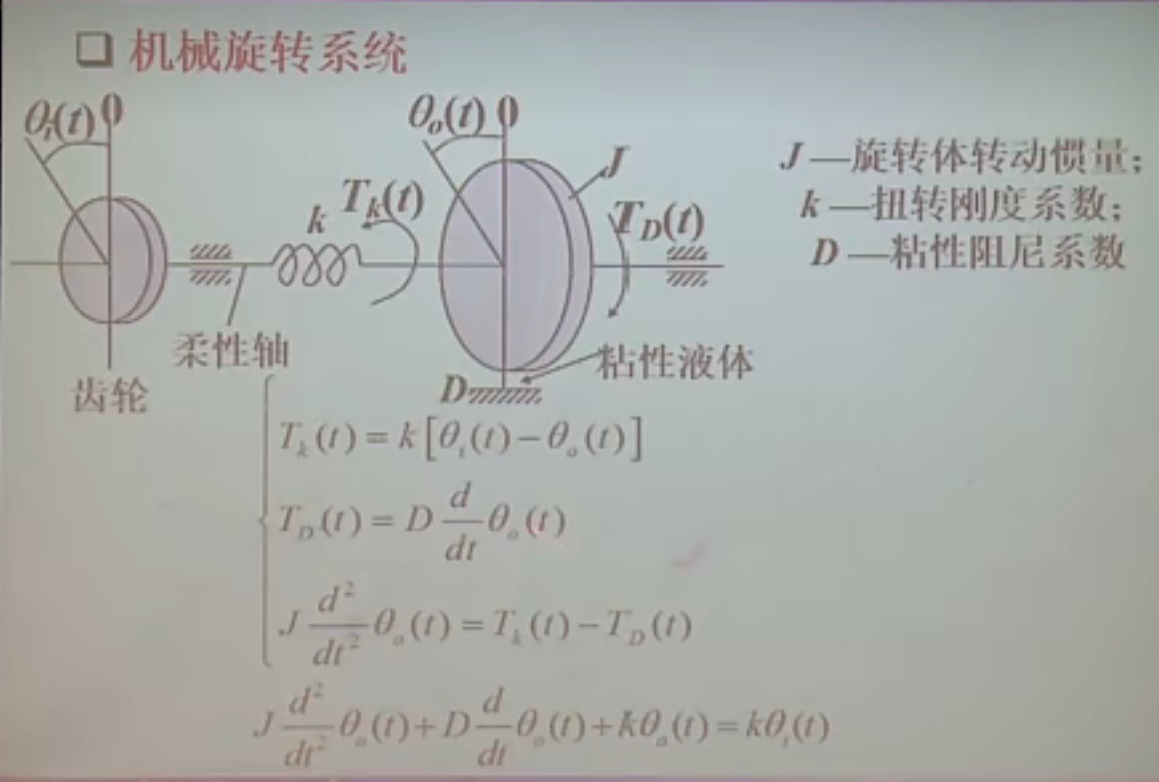
扭转系统(转动):
转动定律:M=Ja=Jdtdω=Jdt2d2θo(t)
扭簧传递的力矩相关:Tk(t)=k[θi(t)−θo(t)]
粘性液体的粘性阻尼力矩相关:TD(t)=Ddtdθo(t)
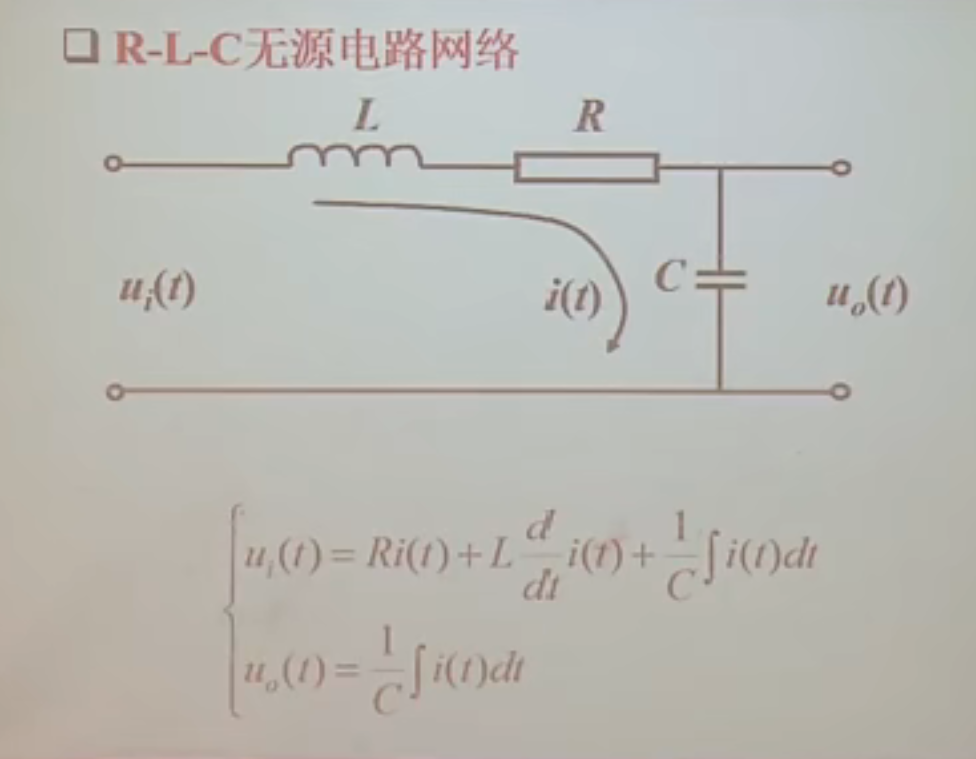
电路系统:
电阻相关:u(t)=R⋅i(t)
电容相关:电容两端的电压和流过的电流关系 u(t)=C1∫i(t)dt
电感相关:u(t)=Ldtdi(t)
R-L-C无源电路网络(电阻-电感-电容)
建立数学模型:因为电流是假设出来的,所以消掉电流i(t),然后建立微分方程,左输出右输入
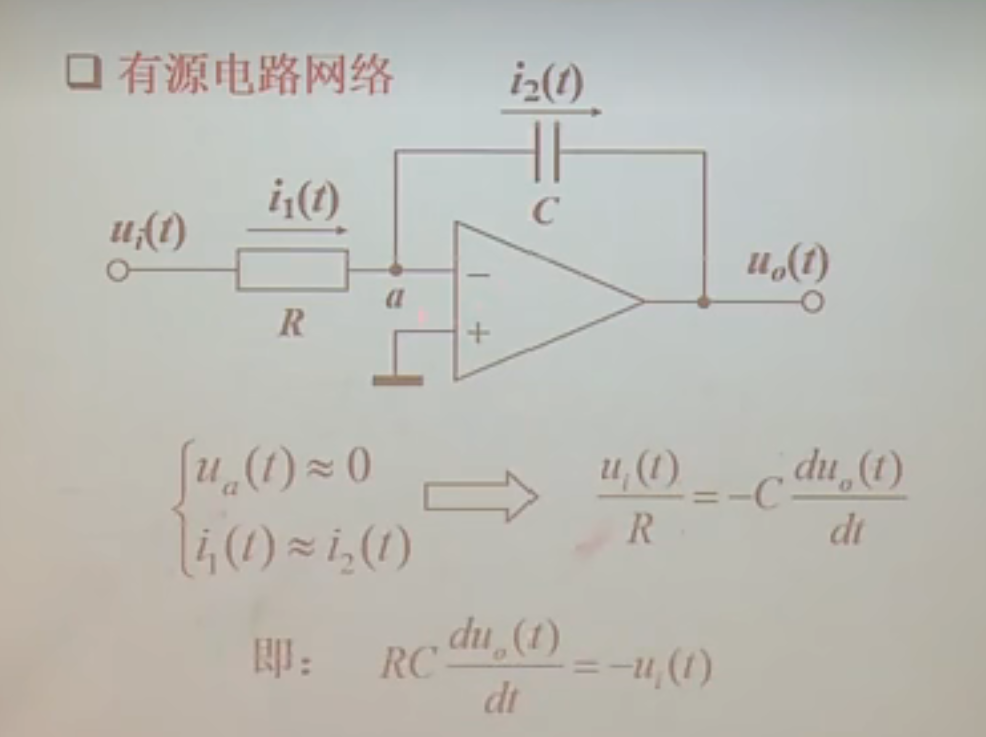
有源电路网络(包含放大器)
建立数学模型:学会运放的基础知识,了解运放怎么工作的,有反馈的运放两个输入端电压平衡后基本一致
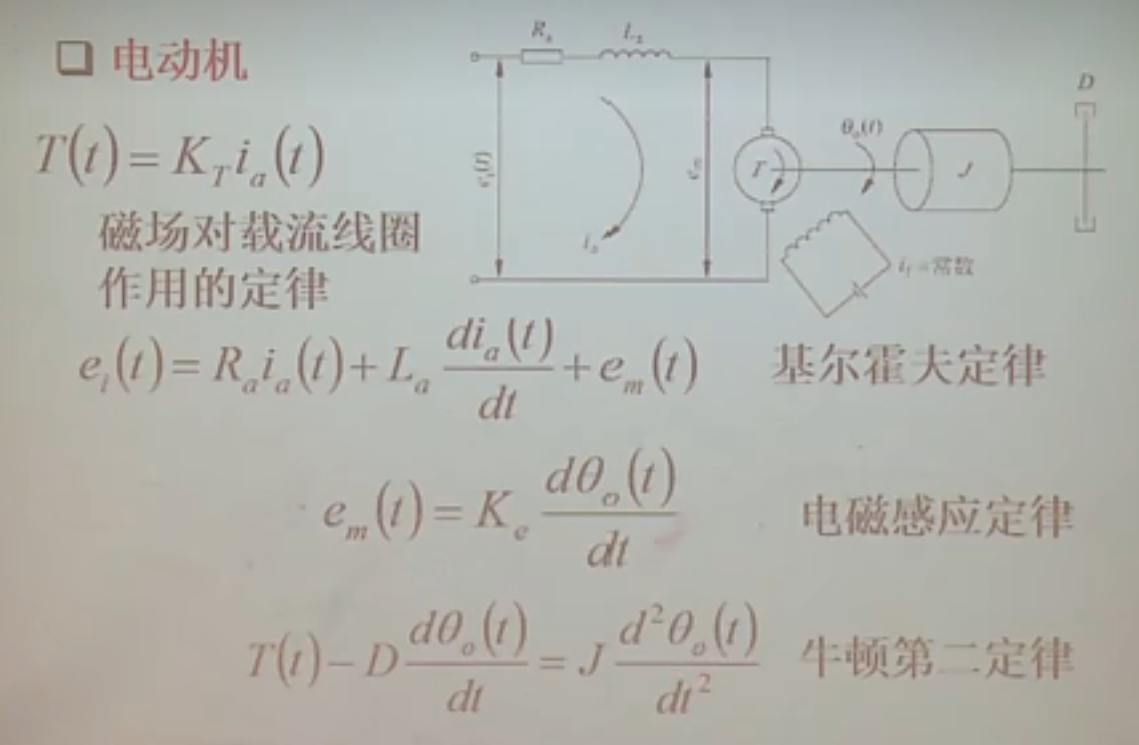
电动机:
基尔霍夫定律: 沿着闭合回路所有元件两端的电势差(电压)的代数和等于零。
电动机力矩方程:T(t)=KTia(t)
电动机电磁感应定律:em(t)=Kedtdθo(t),Ke是电动机反电势系数,θo(t)是电动机转的角度,em(t)是电动机两边的电压
转动定律:M=Ja=Jdtdω=Jdt2d2θo(t)
粘性液体的粘性阻尼力矩相关:TD(t)=Ddtdθo(t)
建立数学模型:然后削去中间变量,左输出右输入
旋转体牛二方程:T=A⋅J,A是质量体的角加速度,J是质量体的转动惯量,单质量体的转动惯量是mr2
数学模型线性化:基本所有的控制数学模型都是非线性的,比如模型中有三角函数,线性化可以是方程简化,简化控制问题而控制几乎不受影响,非线性问题好多还没解决。以下是线性化方法:
如果非线性因素对系统影响很小的时候可以直接忽略掉
如果系统的变量只发生微小的偏移,可以通过取其线性主部,切线法进行线性化(说人话就是泰勒展开,因为泰勒展开本身就是对非线性函数的线性近似),比如sinθo(t)线性成为θo(t)
利用拉式变换可以将微分方程转换成代数方程,简化求解。说白了拉氏变换就是为了简化计算
拉氏变换条件:
f(t)在t≥0时任意有限区间分段连续
要存在一个正实数σ,使得t→∞lime−σt∣f(t)∣→0。也就是说f(t)是指数级的,增长速度赶不上负指数函数随时间的衰减
拉氏变换(输出的是象函数):s=σ+jω
F(s)=L[f(t)]≡∫0∞f(t)e−stdt简单函数的拉氏变换:
单位阶跃函数1(t),
1(t)={0,1,t<0t>0L[1(t)]=s1指数函数eat⋅1(t),L[eat⋅1(t)]=s−a1
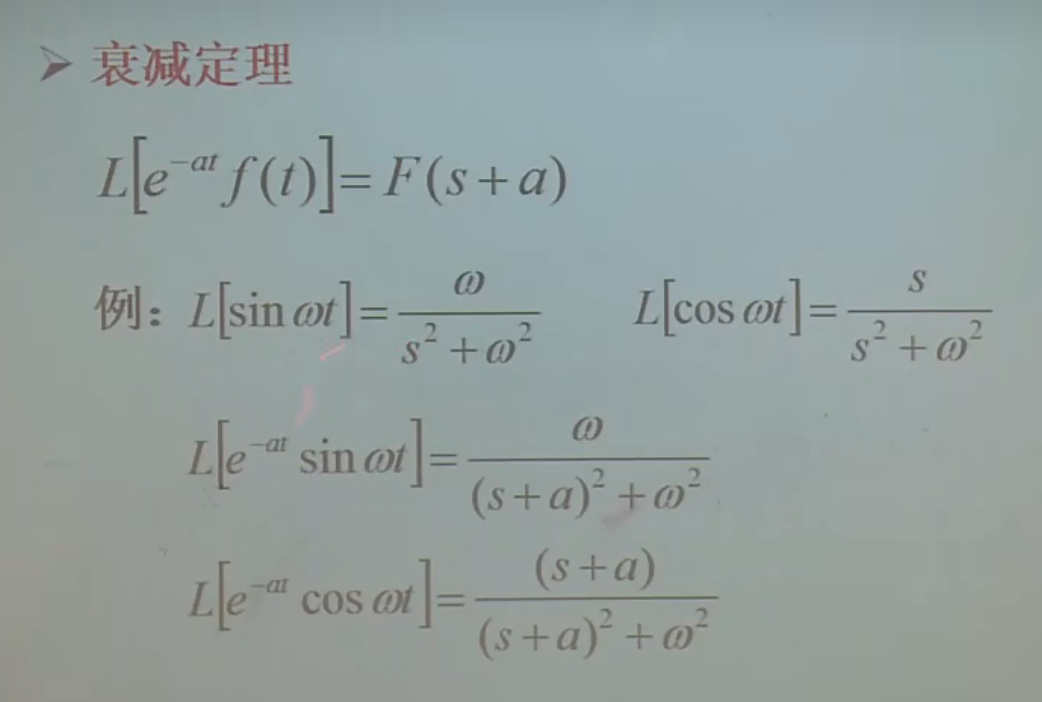
正弦函数sinωt⋅1(t),L[sinωt⋅1(t)]=s2+ω2ω
余弦函数cosωt⋅1(t),L[cosωt⋅1(t)]=s2+ω2s
单位脉冲函数δ(t),
δ(t)={0,ϵ→0limϵ1,t<0,t>ϵ0<t<ϵL[δ(t)]=1单位速度(斜坡)函数,
f(t)={0,t,t<0t≥0L[f(t)]=s21单位加速度函数,
f(t)={0,21t2,t<0t≥0L[f(t)]=s31幂函数tn⋅1(t),L[tn⋅1(t)]=sn+1n!
拉氏变换性质
叠加原理(展现拉氏变换为线性变换):
齐次性:L[af(t)]=aL[f(t)]
叠加性:L[af1(t)+bf2(t)]=aL[f1(t)]+bL[f2(t)]
微分定理(可以把微分方程变成代数方程):
L[dtdf(t)]=sF(s)−f(0)其中f(0)=f(t)∣t=0两个推论:
L[dt2d2f(t)]=s2F(s)−sf(0)−f′(0)L[dtndnf(t)]=snF(s)−sn−1f(0)−sn−2f′(0)−⋯−f(n−1)(0)另外当f(t)在t=0时刻的值为0(零初始条件),那么式子可以直接变成
L[dtdf(t)]=sF(s)L[dt2d2f(t)]=s2F(s)L[dtndnf(t)]=snF(s)积分定理(与微分定理对偶):
L[∫f(t)dt]=sF(s)+sf(−1)(0)其中f(−1)(0)=∫f(t)dt∣t=0当零初始条件时,有
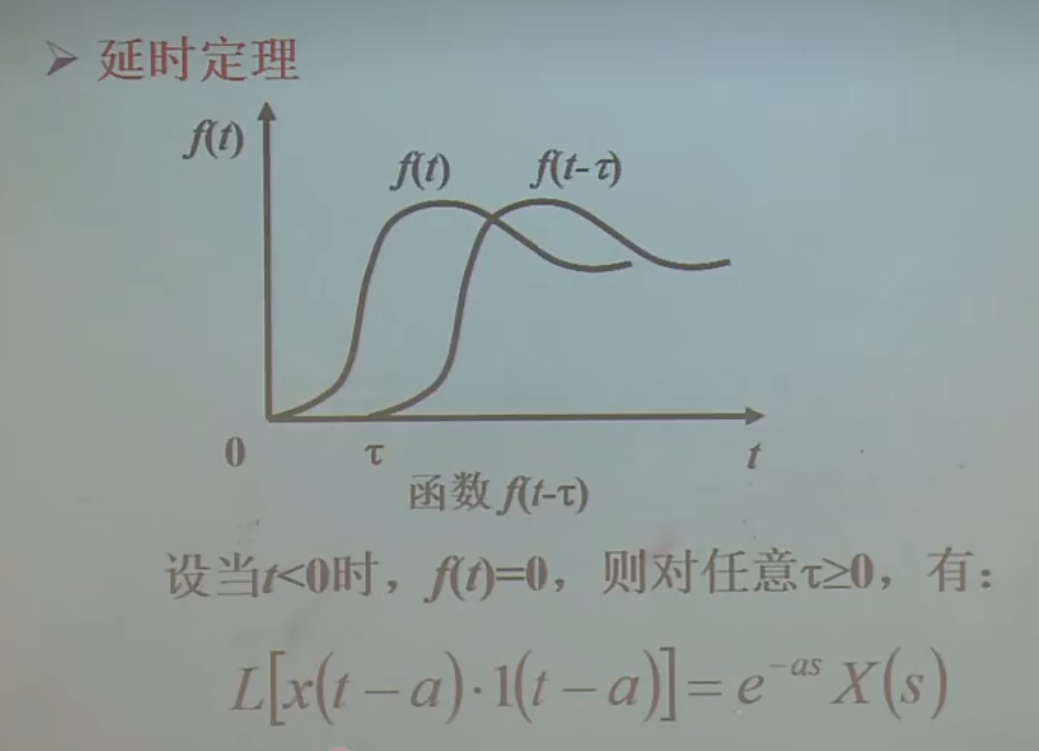
L[∫f(t)dt]=sF(s)L[∫⋯∫f(t)(dt)n]=snF(s)延时定理(令f向右延时a):
L[f(t−a)⋅1(t−a)]=d−asF(s)衰减定理(与延时定理对偶):
L[e−atf(t)]=F(s+a)初值定理(用来求0+的值):
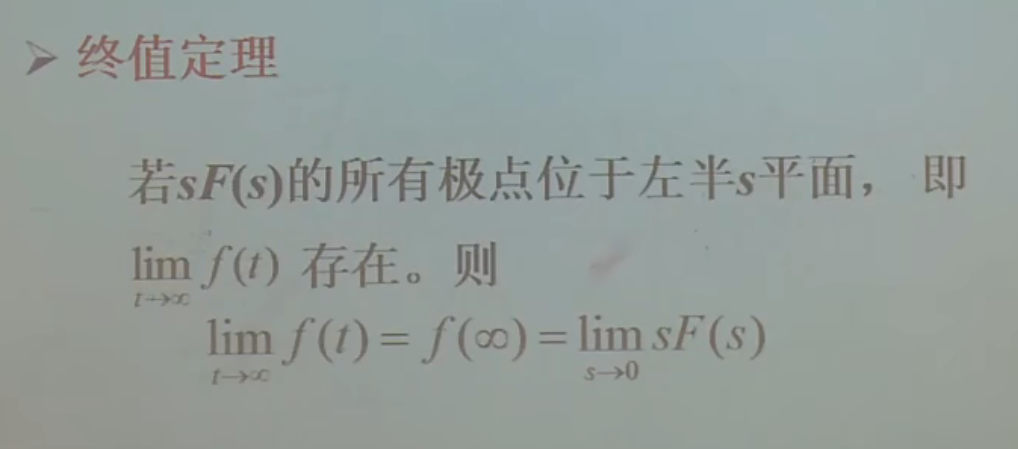
t→0+limf(t)=f(0+)=s→∞limsF(s)终值定理(求稳态误差,但需要有终止):
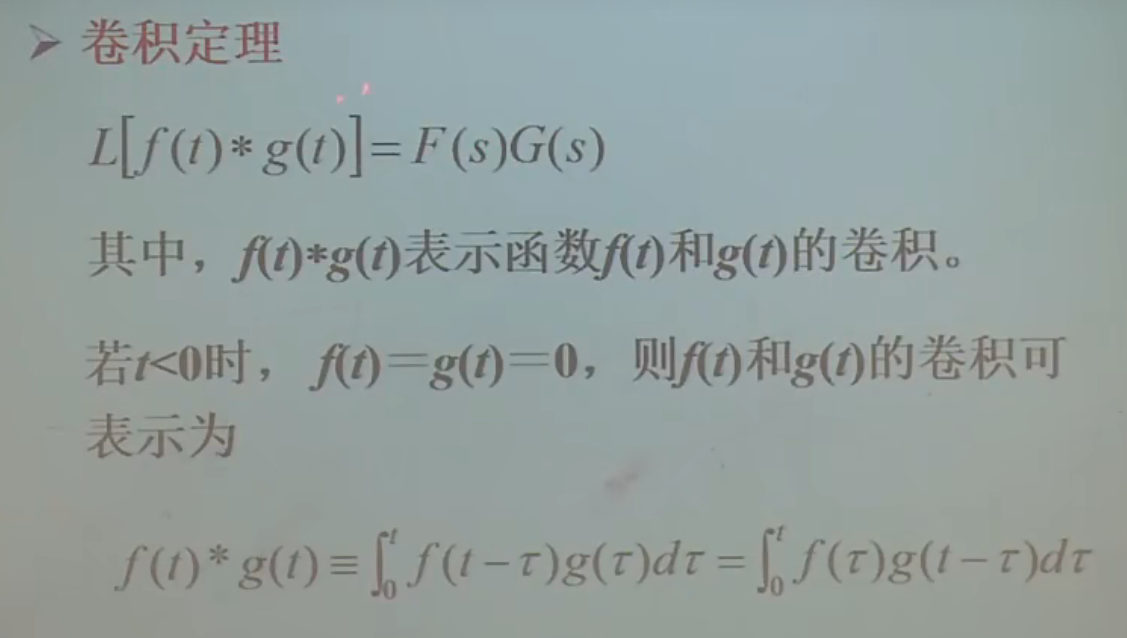
t→∞limf(t)=f(∞)=s→0limsF(s)卷积定理:
L[f(t)∗g(t)]=F(s)G(s)
求拉式反变换就像在求级数和函数S(x)一样,凑来凑去最后利用已知的函数的反变换直接写结果
一个系统的传递函数为G(s)=Xi(s)Xo(s)
传递函数G(s)的特点:
可简化微积分运算,直接进行代数运算(微积分运算→代数运算)
输入典型信号时,其输出与传递函数有一定的对应关系。(因为Xo(s)=G(s)Xi(s),当输入信号是单位脉冲函数δ(s),那么Xi(s)=1,所以此时Xo(s)=G(s))
令传递函数中s=jω,则系统可在频率域内分析(第四章系统的频率特性内容)
G(s)的零极点分布决定系统动态特性(零点:分子为0,极点:分母为零)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
最后更新于